Pesquisadores do MIT (Instituto Tecnológico de Massachusetts) desenvolveram um braço robótico que une dados de uma câmera e uma antena para localizar e recuperar itens, mesmo se eles estiverem enterrados sob uma pilha de outros objetos. Ele está sendo conhecido como “Um robô que encontra itens perdidos!”.
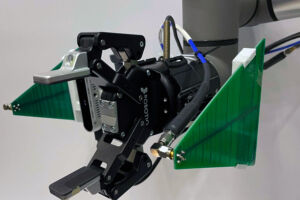
O sistema, chamado de RFusion, é um braço robótico com uma câmera e uma antena de radiofrequência (RF) presa à sua garra. Ele une os sinais da antena com a entrada visual da câmera para localizar e recuperar um item, mesmo se o item estiver enterrado sob uma pilha e completamente fora de visão.
O protótipo do RFusion que os pesquisadores desenvolveram depende de etiquetas RFID, que são etiquetas baratas, sem bateria, que podem ser presas a um item e refletem os sinais enviados por uma antena. Como os sinais de RF podem viajar pela maioria das superfícies, o RFusion é capaz de localizar um item dentro de uma pilha de diversos objetos.
Usando o aprendizado de máquina, o braço robótico zera automaticamente na localização exata do objeto, move os itens em cima dele, agarra o objeto e verifica se ele pegou a coisa certa. A câmera, a antena, o braço robótico e a IA são totalmente integrados, de modo que o RFusion pode funcionar em qualquer ambiente sem a necessidade de uma configuração especial.
Possíveis aplicações para esta tecnologia
Embora encontrar chaves perdidas seja útil, o RFusion pode ter muitas aplicações mais amplas no futuro, como separar itens para atender pedidos em um depósito, identificar e instalar componentes em uma fábrica de automóveis ou ajudar um indivíduo idoso a realizar tarefas diárias em casa, embora o protótipo atual ainda não seja rápido o suficiente para esses usos.
“Essa ideia de ser capaz de encontrar itens em um mundo caótico é um problema em aberto no qual estamos trabalhando há alguns anos. Ter robôs capazes de pesquisar coisas embaixo de uma pilha de objetos é uma necessidade crescente na indústria hoje. No momento, você pode pensar nisso como um Roomba com esteróides, mas, a curto prazo, pode ter muitas aplicações em ambientes de manufatura e warehouse”, disse o autor sênior Fadel Adib, professor associado do Departamento de Engenharia Elétrica e Ciência da Computação e diretor do grupo Signal Kinetics no MIT Media Lab.
Enviando sinais
O RFusion começa a procurar um objeto usando sua antena, que reflete os sinais da etiqueta RFID (como a luz do sol sendo refletida em um espelho) para identificar uma área esférica na qual a etiqueta está localizada. Ele combina essa esfera com a entrada da câmera, o que restringe a localização do objeto. Por exemplo, o item não pode estar localizado em uma área vazia de uma mesa.
Mas, uma vez que o robô tem uma ideia geral de onde o item está, ele precisa balançar seu braço amplamente ao redor da sala, tomando medidas adicionais para chegar à localização exata, que é lenta e ineficiente.
Os pesquisadores usaram o aprendizado por reforço para treinar uma rede neural que pode otimizar a trajetória do robô até o objeto. Na aprendizagem por reforço, o algoritmo é treinado por tentativa e erro com um sistema de recompensa.
“É assim também que nosso cérebro aprende. Somos recompensados por nossos professores, por nossos pais, por um jogo de computador, etc. A mesma coisa acontece na aprendizagem por reforço. Deixamos o agente cometer erros ou fazer algo certo e então punimos ou recompensamos a rede. É assim que a rede aprende algo que é realmente difícil de modelar”, explica Boroushaki.
No caso do RFusion, o algoritmo de otimização foi recompensado quando limitou o número de movimentos que teve que fazer para localizar o item e a distância que teve que percorrer para pegá-lo.
Uma vez que o sistema identifica o ponto exato, a rede neural usa RF combinada e informações visuais para prever como o braço robótico deve agarrar o objeto, incluindo o ângulo da mão e a largura da garra, e se deve remover outros itens primeiro. Ele também verifica a etiqueta do item uma última vez para ter certeza de que pegou o objeto certo.
Cortando a desordem
Os pesquisadores testaram RFusion em vários ambientes diferentes. Eles enterraram um chaveiro em uma caixa cheia de bagunça e esconderam um controle remoto sob uma pilha de itens em um sofá.

Mas, se eles alimentassem todos os dados da câmera e medições de RF para o algoritmo de aprendizado de reforço, isso teria sobrecarregado o sistema. Portanto, com base no método que um GPS usa para consolidar dados de satélites, eles resumiram as medições de RF e limitaram os dados visuais à área bem na frente do robô.
A abordagem funcionou bem – o RFusion teve uma taxa de sucesso de 96 por cento ao recuperar objetos que estavam totalmente escondidos sob uma pilha.
“Às vezes, se você confiar apenas nas medições de RF, haverá um outlier, e se você confiar apenas na visão, às vezes haverá um erro da câmera. Mas se você combiná-los, eles se corrigirão. Isso é o que tornou o sistema tão robusto”, diz Boroushaki.
No futuro, os pesquisadores esperam aumentar a velocidade do sistema para que ele possa se mover suavemente, em vez de parar periodicamente para fazer medições. Isso permitiria que o RFusion fosse implantado em um ambiente de manufatura ou depósito em ritmo acelerado.
Além de seus potenciais usos industriais, um sistema como este poderia até mesmo ser incorporado em futuras casas inteligentes para ajudar as pessoas em qualquer número de tarefas domésticas, diz Boroushaki.
Sem dúvidas o RFID, assim como, os robôs que utilizam as tecnologias de machine learning serão cada vez mais comuns em nosso cotidiano. Para ler a reportagem completa e saber mais dos RFID clique aqui.
Para aprender mais sobre o mundo da indústria 4.0 leia em nosso site.

