Um novo sistema de controle, demonstrado através do mini chita robótico do MIT, permite que robôs de quatro patas saltem em terreno irregular em tempo real. Apesar de parecer fácil, fazer um robô se mover dessa maneira é uma perspectiva totalmente diferente.
Nos últimos anos, robôs de quatro patas inspirados pelo movimento de chitas e de outros animais deram grandes saltos à frente, mas ainda ficam para trás em relação aos mamíferos quando se trata de viajar por uma paisagem com mudanças rápidas de elevação.
Agora, Gabriel Margolis, um aluno de doutorado no laboratório de Pulkit Agrawal (professor de Ciência da Computação e Laboratório de Inteligência Artificial (CSAIL) no MIT), e seus colaboradores desenvolveram um sistema que melhora a velocidade e agilidade dos robôs com pernas enquanto eles saltam por lacunas no terreno.
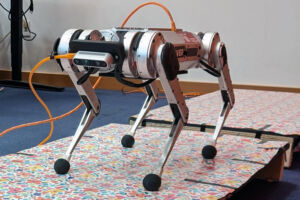
O novo sistema de controle é dividido em duas partes – uma que processa a entrada em tempo real de uma câmera de vídeo montada na frente do robô e outra que traduz essas informações em instruções de como o robô deve mover seu corpo. Os pesquisadores testaram seu sistema no MIT mini chita, um robô poderoso e ágil construído no laboratório de Sangbae Kim, professor de engenharia mecânica.
Ao contrário de outros métodos para controlar um robô de quatro patas, este sistema de duas partes não requer que o terreno seja mapeado com antecedência, para que o robô possa ir a qualquer lugar. No futuro, isso pode permitir que robôs entrem na floresta em uma missão de resposta a emergências ou subam um lance de escadas para entregar medicamentos a um idoso internado.
Está tudo sob controle
O uso de dois controladores separados trabalhando juntos torna este sistema especialmente inovador.
Um controlador é um algoritmo que converterá o estado do robô em um conjunto de ações a serem seguidas. Muitos controladores cegos – aqueles que não incorporam a visão – são robustos e eficazes, mas apenas permitem que os robôs caminhem em terrenos contínuos.
A visão é uma entrada sensorial tão complexa para processar que esses algoritmos são incapazes de manipulá-la com eficiência. Os sistemas que incorporam a visão geralmente dependem de um “mapa de altura” do terreno, que deve ser pré-construído ou gerado em tempo real, um processo que normalmente é lento e sujeito a falhas se o mapa de altura estiver incorreto.

Para desenvolver seu sistema, os pesquisadores pegaram os melhores elementos desses controladores robustos e cegos e os combinaram com um módulo separado que lida com a visão em tempo real.
A câmera do robô captura imagens profundas do terreno próximo, que são enviadas a um controlador de alto nível junto com informações sobre o estado do corpo do robô (ângulos articulados, orientação do corpo, etc.). O controlador de alto nível é uma rede neural que “aprende” com a experiência.
Essa rede neural produz uma trajetória de destino, que o segundo controlador usa para gerar torques para cada uma das 12 articulações do robô. Este controlador de baixo nível não é uma rede neural e, em vez disso, depende de um conjunto de equações físicas concisas que descrevem o movimento do robô.
Ensinando a rede
Os pesquisadores usaram o método de aprendizado por reforço para treinar o controlador de alto nível. Eles fizeram simulações do robô correndo por diferentes tipos de terrenos descontínuos e recompensaram-no por cruzamentos bem-sucedidos.
Com o tempo, o algoritmo aprendeu quais ações maximizaram a recompensa.
Em seguida, eles construíram um terreno aberto e físico com um conjunto de pranchas de madeira e colocaram seu esquema de controle em teste usando a mini chita.
“Foi definitivamente divertido trabalhar com um robô projetado internamente no MIT por alguns de nossos colaboradores. O mini chita é uma ótima plataforma porque é modular e feito principalmente de peças que você pode encomendar online, então se quiséssemos uma nova bateria ou câmera, era apenas uma questão de encomendá-la de um fornecedor regular e, com um pouco com a ajuda do laboratório de Sangbae, instalar”, diz Margolis.

Estimar o estado do robô provou ser um desafio em alguns casos. Ao contrário da simulação, os sensores do mundo real encontram ruídos que podem se acumular e afetar o resultado. Portanto, para alguns experimentos que envolveram o posicionamento do pé em alta precisão, os pesquisadores usaram um sistema de captura de movimento para medir a verdadeira posição do robô.
O sistema deles superou outros que usam apenas um controlador, e a mini chita cruzou com sucesso 90% dos terrenos.
“Uma novidade do nosso sistema é que ele ajusta a marcha do robô. Se um humano estivesse tentando pular por uma lacuna realmente grande, ele poderia começar correndo muito rápido para ganhar velocidade e então eles poderiam colocar os dois pés juntos para dar um salto realmente poderoso através da lacuna. Da mesma forma, nosso robô pode ajustar os tempos e a duração de seus contatos de pé para melhor atravessar o terreno ”, diz Margolis.
Pulando para fora do laboratório
Embora os pesquisadores tenham conseguido demonstrar que seu esquema de controle funciona em laboratório, eles ainda têm um longo caminho a percorrer antes de implantar o sistema no mundo real, diz Margolis.
No futuro, eles esperam montar um computador mais poderoso para o robô para que ele possa fazer todos os cálculos a bordo. Eles também querem melhorar o estimador de estado do robô para eliminar a necessidade do sistema de captura de movimento. Além disso, eles gostariam de melhorar o controlador de baixo nível para que ele possa explorar toda a amplitude de movimento do robô e aprimorar o controlador de alto nível para que funcione bem em diferentes condições de iluminação.
Apesar de ainda existir um longo caminho até que o sistema possa ser implementado no mundo real ele já consegue empolgar, trazendo perspectivas de um futuro onde robôs consigam auxiliar ainda mais os seres humanos na realização de suas atividades.
Quer saber mais sobre o mini Chita? Leia a matéria completa.
Para seguir acompanhando as principais novidades da indústria 4.0 leia nosso site.

